David Hermann, a development engineer at Porsche Engineering Services, shares how the OEM is using racetrack simulation to fine-tune its automated driving offer, having presented on the same subject at the recent conference that took place during ADAS & Autonomous Vehicle Technology Expo Europe, in Stuttgart, this June.
David Hermann, a development engineer at Porsche Engineering Services, shares how the OEM is using racetrack simulation to fine-tune its automated driving offer, having presented on the same subject at the recent conference that took place during ADAS & Autonomous Vehicle Technology Expo Europe, in Stuttgart, this June.
During his presentation, Driving in the high dynamics area: a simulation environment for automated driving on racetracks, Hermann discussed how the race between automotive manufacturers to bring new technologies into vehicles is being fueled by tighter emissions standards, stricter safety requirements and higher levels of driving automation. As a result, racetrack simulation is becoming increasingly important, providing a safe, cost-effective, efficient means to evaluate vehicle performance.
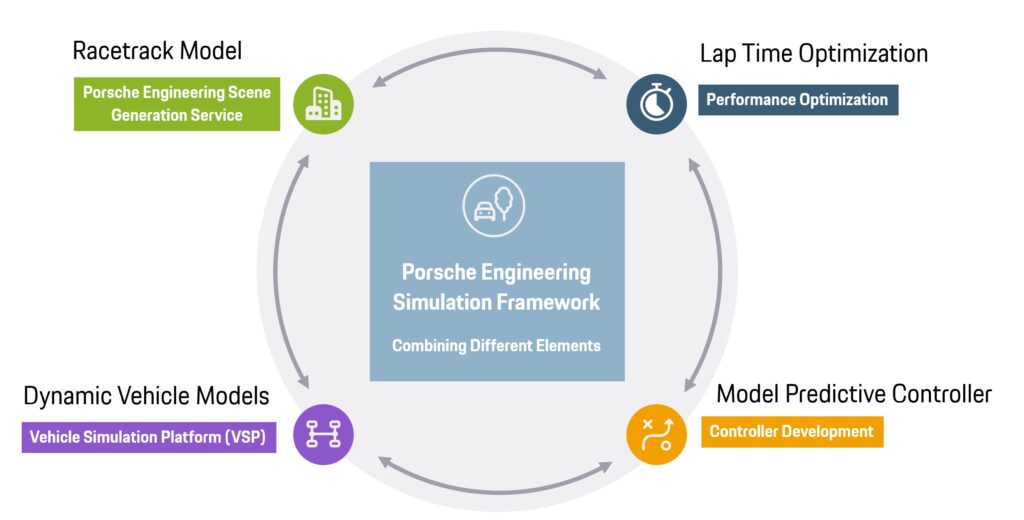
He also showcased how Porsche is taking a modular simulation approach that combines a high-fidelity track environment (based on its Nardò circuit) and a full vehicle model, as well as model predictive control (MPC) that includes a method to optimize the trajectory and speed profile to generate a realistic driving profile with best lap performances.
ADAS & Autonomous Vehicle International caught up with the development engineer to discover more about Porsche’s racetrack simulation and the company’s approach to automated driving.
What is Porsche’s approach to automated driving?
Porsche sports cars inspire with performance and passion. At the same time, automated driving functions also offer the driver relief in everyday situations. When developing automated driving functions, Porsche’s focus is on the highest-possible utility value and great reliability. It is not about being the first to be present on the market with such a system. In its development work, Porsche is therefore consistently focusing on advanced assistance systems and highly automated driving functions.
What is your role within Porsche?
Since graduating in 2013 with a degree in electrical engineering and information technology from the TU Darmstadt, I have worked as a development engineer and specialist project leader at Porsche Engineering. My focus has been on ADAS simulation, a field that fascinates me for its versatility and early-stage exploration of automotive concepts. Additionally, I am currently doing my PhD as a visiting scientist at TU Munich, where I am researching automated vehicle testing on proving grounds, contributing to the advancement of future and intelligent testing.
How is Porsche using simulation to fine−tune its ADAS and automated driving offer?
In our department, we specialize in developing customized simulation environments to meet our clients’ specific needs. Our focus lies in creating modular solutions, enabling us to combine diverse tools and platforms and tailor them to specific requirements. This involves incorporating important input data such as scenarios and scenes, which are essential for creating a realistic virtual testing environment. One area of our innovation involves leveraging our simulation framework to augment reality with virtual environments for vehicle testing.
Another notable example is our utilization of the framework for the automated generation of scenarios based on real vehicle data as part of the AVEAS research project, funded by the German Federal Ministry for Economic Affairs and Climate Action (BMWK) and being undertaken at the Fraunhofer Institute. The project aims to develop scalable and sustainable methods to specifically identify critical situations in real traffic and transfer them into models for generating scenarios and behavioral simulations.
The AVEAS project also seeks to provide the basis for virtually testing automated driving functions at critical system boundaries in interaction with traffic. Risk factors such as: the topics of technical perception – to what extent does a vehicle perceive the world differently from human road users; shared driving responsibility – how does the transfer of driving responsibility influence the risk; and the interaction of human and automated transport systems will be modeled and explored. The long-term goal is to create an agent-based traffic simulation that depicts real traffic with sufficient accuracy.
Why simulate a high−fidelity track environment and a full vehicle model?
Simulating a high-fidelity track environment and full vehicle model is an efficient and cost-effective approach for testing and developing automated driving. Developers can test and refine vehicle components and systems in a safe and controlled setting, minimizing the need for expensive and time-consuming real-world testing. Challenges include modeling the environmental conditions and their influences on the respective components, such as sensors, tires and powertrain.
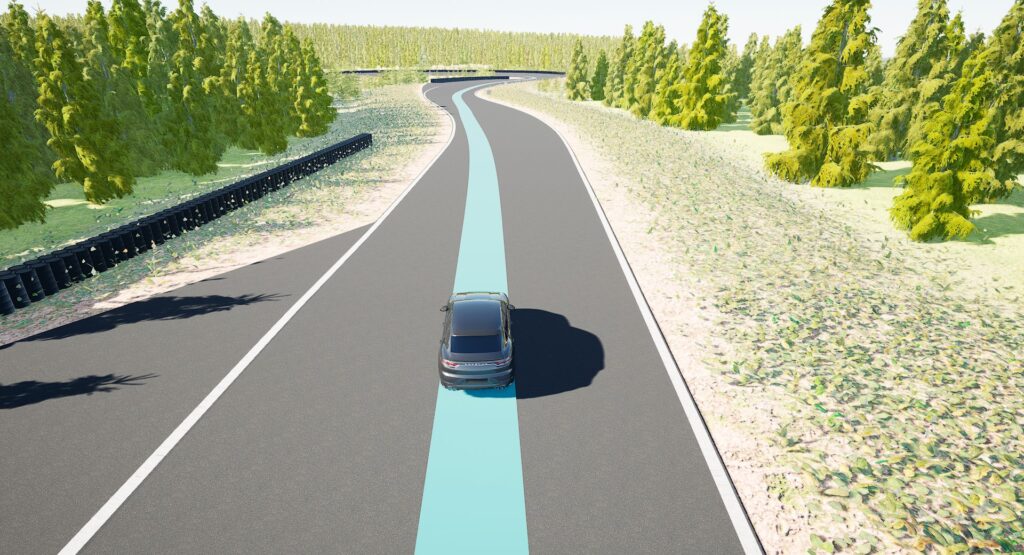
Especially in racetrack simulation, it’s sometimes the little things that have a significant impact on the vehicle performance and ultimately the loads and lap times. High-fidelity tracks offer detailed information about the route, including its elevation and specific features such as curbs. When a vehicle drives over these features, it can result in varying loads on the tires and suspension, ultimately influencing lap times and performance.
What are some of the variables that you can simulate?
Based on our in-house development expertise, we build virtual environments and models where we have control over numerous variables. This includes the ability to modify specific vehicle components like chassis kinematics, transmission ratios, drive torques and tire characteristics. We can even create and implement entirely new vehicle types into the simulation environment. Additionally, we have the ability to influence environmental variables, such as the track layout, and individual details such as curbs and surface conditions. This allows us to evaluate the system’s performance under different scenarios and optimize components or algorithms accordingly. However, it’s important to note that unknown unknowns still exist, requiring a continuous feedback loop between simulation and real-world validation.
What are some of the challenges?
Models provide a simplified mathematical representation of reality and may not always accurately capture all aspects. For instance, a race driver may approach a track section differently from what the calculations for lap time optimization, based on the existing vehicle model, would suggest. Drawing from their experience and pushing the vehicle to its limits, the race driver may choose a different trajectory or speed. It is crucial to incorporate these constraints and limitations into the vehicle model and strategy to ensure an even more accurate representation.

How important are proving grounds? Do you use physical testing to verify your findings?
We constantly compare our simulation results with real measurements from the corresponding racetracks, for example from the Nardò Technical Center in Italy. We use this for further optimizations and extensions of the simulation models.
Proving grounds play a crucial role in the testing and development of automated driving functions, especially for ADAS/AD. These controlled environments offer several advantages, including reproducible scenarios, realistic conditions, multiple testing opportunities and comprehensive performance evaluation.
Proving grounds act as a bridge between simulations and real-world testing, ensuring safety and facilitating thorough development processes. By creating safe environments, critical situations can be specifically generated for the entire vehicle or its functional chain, allowing all system components to be tested and optimized under authentic conditions. This enables robust and reliable performance evaluation of automated driving systems that would not be possible in public road traffic.
This interview is also available in the September 2023 issue of ADAS & Autonomous Vehicle International magazine – you can find our full magazine archive, here – all magazines are free to read.